The intake is still in it’s prototype phases, so we don’t have all of the details ironed out yet but are hoping to get there in the next few days. We’ve been testing it some and we’re looking to post some more about it in our next blog post(s), but here’s some additional information to hopefully clarify some things.
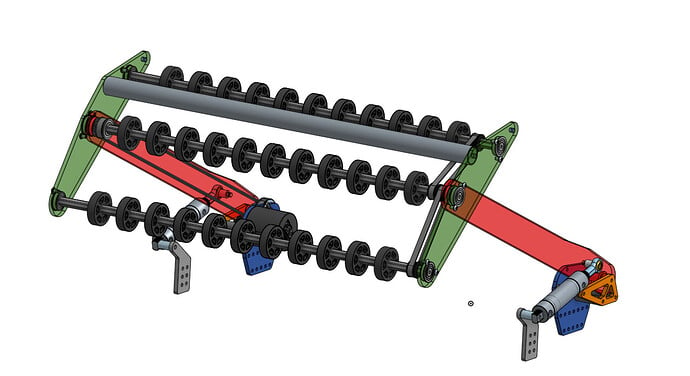
The intake will be actuated outward and, since the roller plate (green plate) is able to pivot about the link that is moving (red plate), the rollers will also make their way outside of the frame.
What’s important here, and potentially not very intuitive, is that we need a way to constrain the movement of that roller plate (green) such that the rollers form into the general geometry that we desire (AKA: no dead zones and ample compression throughout the ball’s journey from the floor → over the bumper → into the robot frame).
This is the function of the surgical tubing; as the intake is actuated outside of frame from its “collapsed” position, the surgical tubing becomes taut and forces the rollers into roughly the desired location.
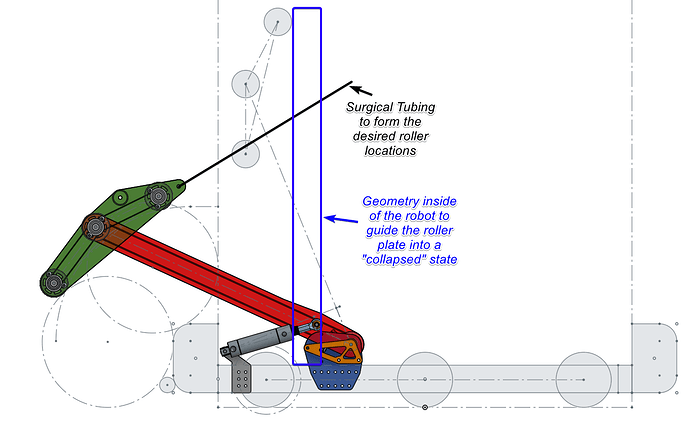
On the other hand, when we need to retract the intake back into frame, we can’t rely on the surgical tubing to do much since it becomes slack and the roller plate (green) is able to just freely flop around. So in order to get the intake back into a stowed/collapsed position, we need some helping geometry to guide the roller plate (green) along its actuation path and into its collapsed location.
We’re not too sure what exactly this helping geometry is going to look like just yet, but it may look something like using our tower’s 1×1 tube with some standoffs or plates to get underneath the sloped side of the roller plate (green) to get it to kinda nicely ramp up and into its collapsed state.
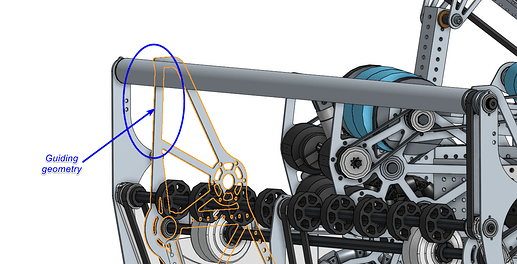
1678 guiding geometry example – we believe that this section of this plate is what helped guide 1678’s intake up and into its stowed position, though we may very well be mistaken.
We’re also still thinking about whether or not this style of actuation is what we want to go with. As development progresses, we’ll be sure to keep the thread updated on what route we end up going with.
Hopefully this video of us performing a very useful test helps visualize the function of the surgical tubing and whatnot  .
.