
Sorry for the delay in posts, we’ve been super busy finishing up the design and getting all the facts straight. We’ve been making and assembling lots of parts already too, but that will be saved for a slightly later post to keep this one resonable.
Top-level Robot Design
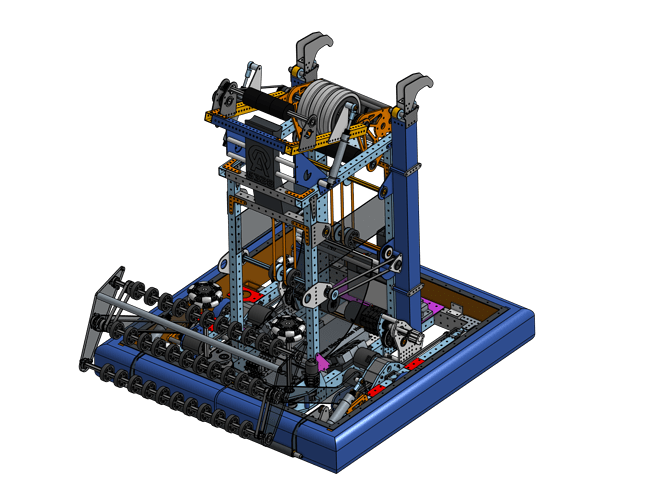
We’re still putting some finishing touches on the climber and are hoping to put forth a lot of effort into a high-rung climb after we have most of the robot assembled and running. Ideally we’d have a group of mentors & students devoting the majority of their time to that while the rest of the robot is being manufactured & assembled but due to our current mentor & student count, that’s unfortunately not entirely realistic for us.
Overall, we’re pretty happy with how modular the design turned out. Thanks to the gusset+tube construction style that we’re utilizing more of, we should be able to fairly easily adjust portions of the design when something inevitably doesn’t work / breaks / etc.
Specifications
- Overall weight: ~94.702 lb (not including batter or bumpers)
Onshape predicts our robot to be roughly 110 lbs, which gives us at least some headroom for the rest of our climb and whatever high-rung mechanism we come up with.

- Center of Mass
We think that it’ll be important for our drivers to just be able to punch it and not have to worry about the robot tipping (a couple of software mechanisms will help with that as well). Hopefully this can get even lower with any ballast we add to get up to 120 lbs.

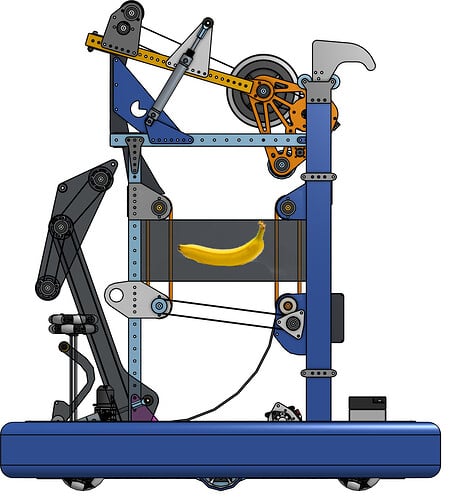
- Length x Width x Height: 30x29x40
Banana for scale (except it was just photoshopped in and may not be the correct scale).
- Motors: 14
Drivetrain: 6 NEO
Intake: 1 NEO
Hopper: 1 NEO 550
Tower: 1 NEO 550
Flywheel: 2 NEO
Climber: 2 NEO
Drivetrain and Electronics
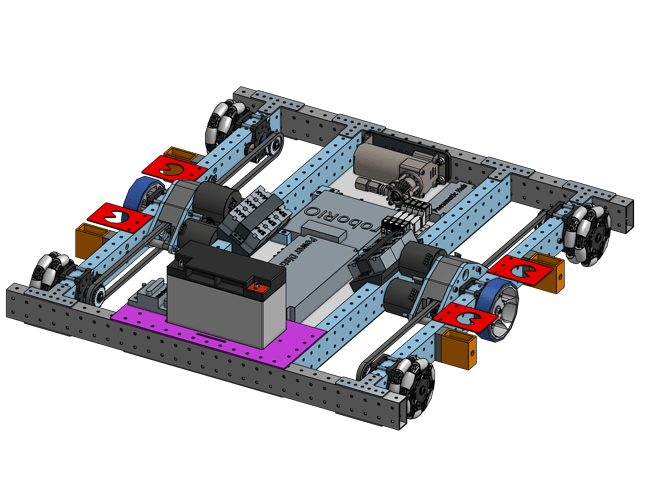
Weight (includes electronics but not battery): 36.955 lb

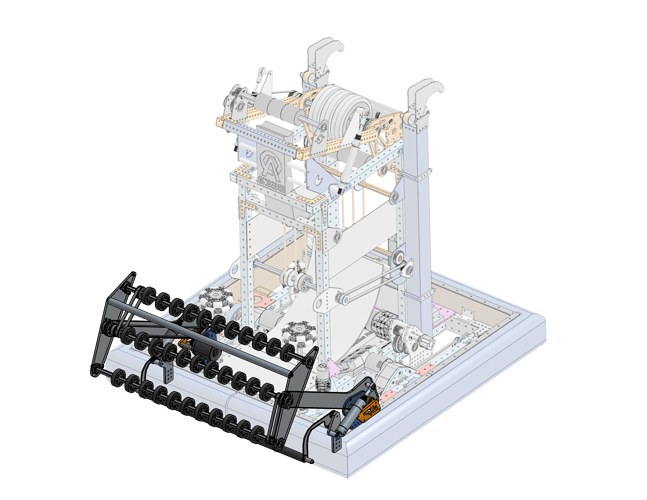
Intake
Retracted
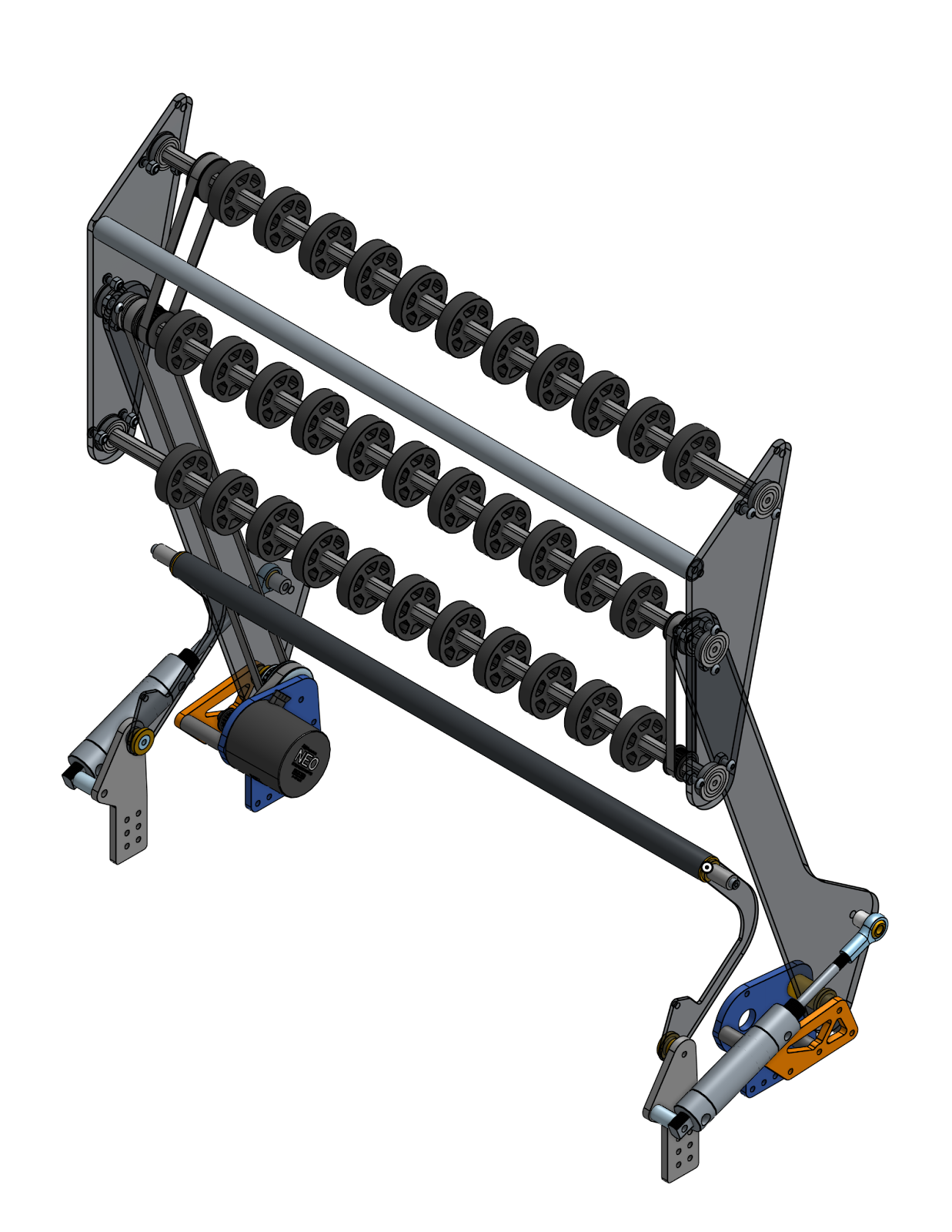
Extended

There haven’t been too many changes made to the intake since our last update post, but we were able to shorten the link lengths which should help reduce at least some of the floppiness.
As in our prototype videos, we’re also using a dropdown bar – we found that this helped our prototype apply more favorable compression on the bumper, so we’ll be sticking with that for our final intake as well.
The dropdown bar starts spring loaded up via surgical tubing – it will be knocked down by our intake at the start of the match, at which point the surgical tubing over centers and is consequently spring loaded down throughout the rest of the match.
- Weight: ~12.296 lb

- Gear ratio: 60:16
We picked this to be roughly in the right ballpark from our guess while packaging in a N:16 for our prototype and it worked well enough that we didn’t feel like we needed to change it. The top roller, however, is just slightly slower than the other 2 rollers – the hope is that this will help reduce the tendency for balls to jump out the top of the “hopper” area.
“Hopper”
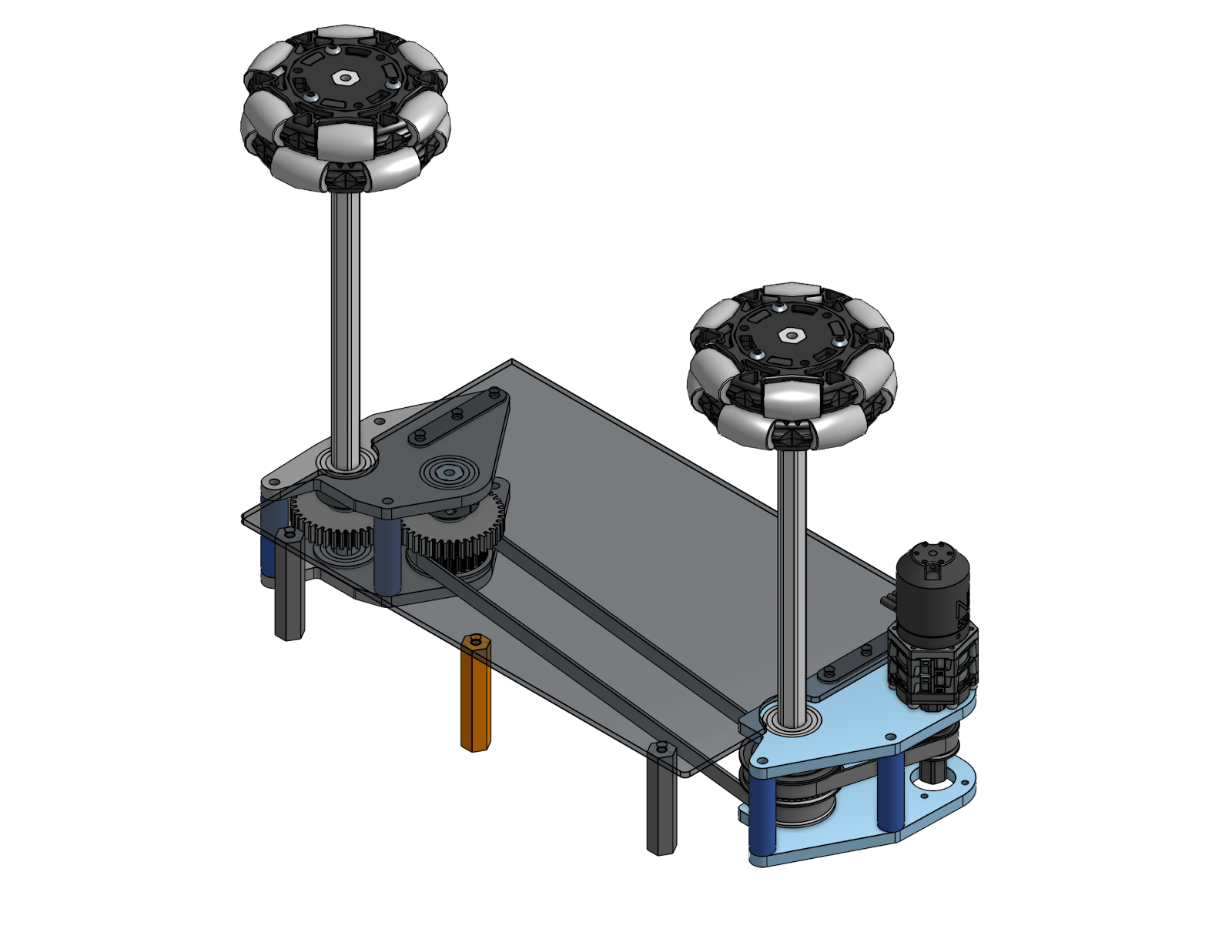
Hopper is probably the wrong term here as all it does is center the balls and not store them, but for lack of a better term that’s what we’re going with.
We had good success with this in our prototype testing and were surprised that it worked pretty well with balls entering from the edges of the intake. There will be some adjustments that we’ll need to make when it’s actually on the robot (the height of the omnis, maybe the distance between the omnis and the bumper, etc.) and we may end up adding a couple pieces of polycarb around the “hopper” if we encounter issues with cargo bouncing out of the robot.
Shooter


We chose to go with a tube-style hood (as opposed to plate) so that we’d have an easier time fixing any small issues that we may encounter with locations of rollers/cylinders/etc., as well as potentially improving it as the season progresses.
From our testing, it seems like a top roller helps improve consistency and removes some of the backspin that the main flywheel imparts on the ball – something that may (or may not) help reduce the likelihood of cargo bouncing out of the goal.
Right now the CAD shows the top roller being controlled independently of the main 6” flywheel – the hope here is that we can get more flexibility in the speed & the amount of backspin that we put on the ball, which will hopefully let us control our shot trajectory a bit. This seemed to work from our prototype testing, but we’re a bit nervous that them being mechanically separate may lead to shot inconsistency due to the recovery time of each being different. If this approach ends up being unsuccessful, we’ll just belt the second motor to the 6” flywheel and print that double pulley with a hex bore instead of a bore for bearings.
Tower

The tower is copied from our prototype tower/shooter and simply swapped to the real construction style. The exact control scheme for how we will index the balls in the hopper is tbd after playing with it more, but we have a few ideas involving 1 or 2 beam break sensors.
Climber
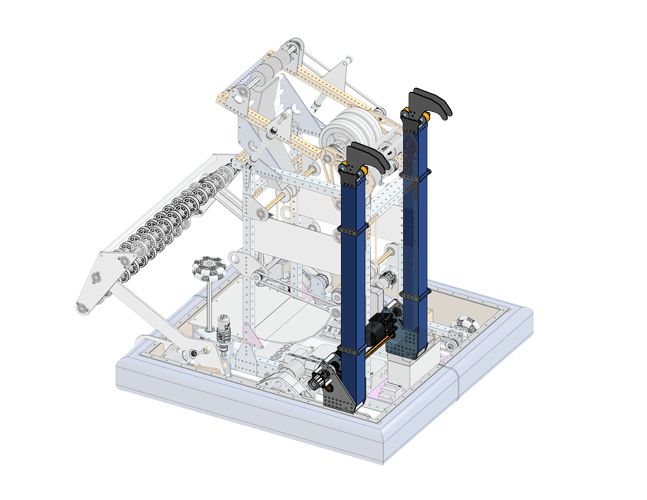
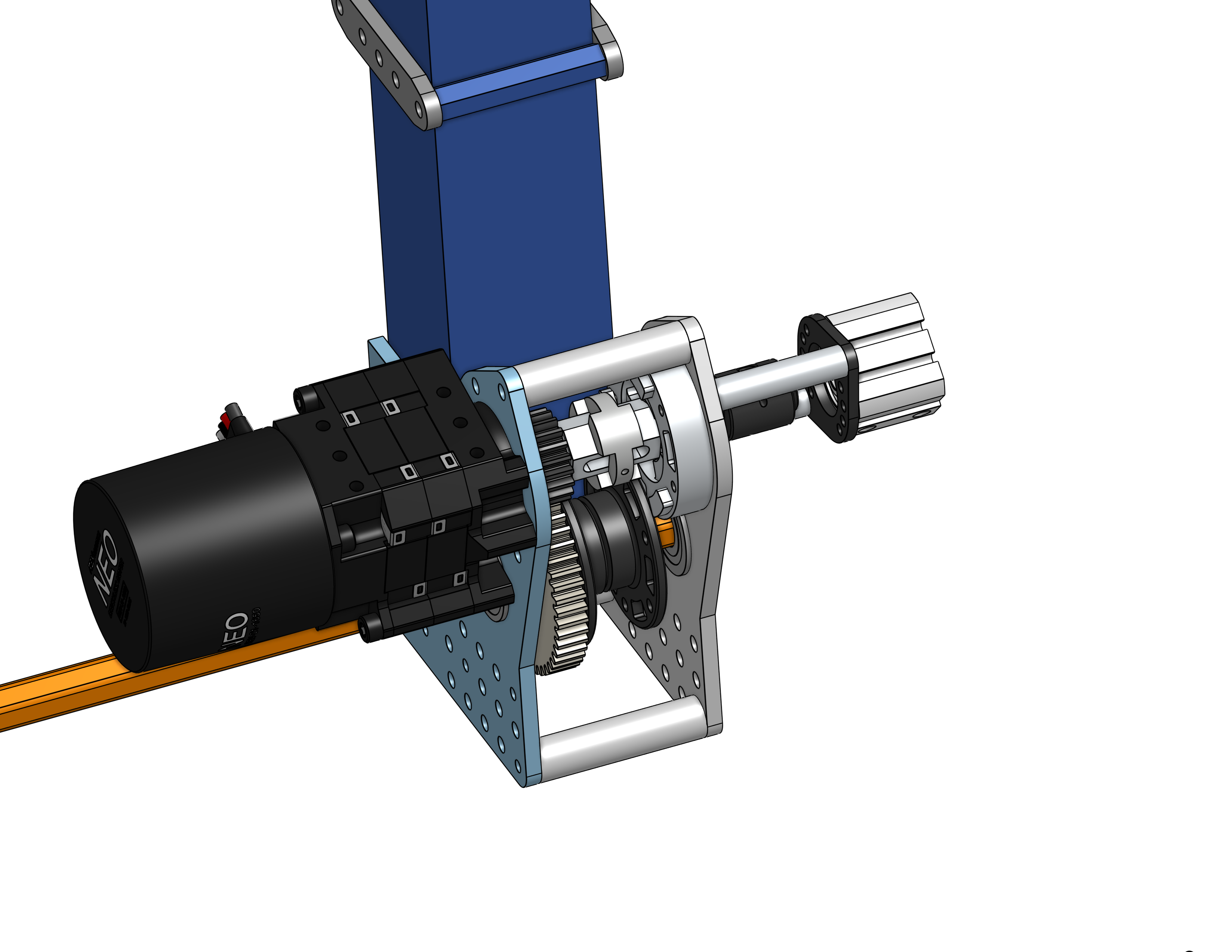
The climber is a single stage telescoping with a 2×2 outer tube and 1×1 inner. It’s pulled up by constant force springs and winched down by2 NEOs through MAXPlanetary gearboxes. The stages slide on two 3D printed blocks, the top of which has bearings pressed in on pins. There is a WCP shifter shaft and PTO kit block to act as a break which goes directly into the MAXPlanetary output.
There is still the most work to do to finalize the details here before manufacturing. We will also be adding (at some point) a set of passive tilting hooks to have a 2013 style High/Traversal climb (or at least that’s the dream). More details to come in a later post.
Design Reviews
We didn’t immediately arrive at this design, there were many small (and not so small) iterations which were made before actually manufacturing a first revision. Look out for a post soon going through some of the changes which were made to lead to what you see now.
 2
2
When Onshape won’t load and the CAD is just a bunch of huge blocks