
Can you help me understand the axis your passive hooks rotate about? It looks to me that you have a plate that both the passive hooks and elevator are connected by and then the passive hooks rotate about a bolt going through a bushing? Or is there a shaft in the bushing and the bolt is retaining that shaft? What has your experience with that? Is the bolt/shaft strong enough to hold up the robot under any shock loads while climbing?
The 1×1 structure which the passive hooks are mounted to pivots about a hole in the plate which mounts the gearboxes and telescoping stage. The pivot at the bottom is a 1/2″ aluminum standoff tapped 10-32 both sides with a bushing in the tube to pivot about. This hasn’t caused us any issues, but making the bolts mounting the standoff either 1/4-20 or through the entire standoff is certainly safer given the shock loading of the initial tilt when the robot weight is placed on these hooks.
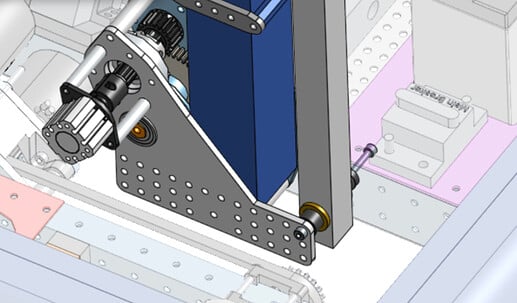
The hooks at the top simply pivot about a 1/4-20 bolt. A bushing can’t hurt but we didn’t find we need it given how little it rotates.
I see the surgical tubing pulling the passive hooks back, is their hard-stop in the back direction those standoffs on the elevator? And are you using rope to limit how far out the hooks rotate while loaded?
The rope serves as the hard stop in our system, that was simple and allowed for fairly easy adjustability. The surgical tubing mostly serves to keep the system inside frame perimeter but also helps damp the aggressive tilt when the weight of the robot transitions to the passive hooks.