
Following on from our priority list the team started working on prototyping, setting up the software framework for 2022 on an old robot, and strategy came up with their game plan for the season.
Prototypes
Using our priorities determined on kickoff weekend we decided on 3 main areas to prototype. Once we learn from these they will get more detailed and be integrated together in a more detailed prototype. This will include adding the indexing/hopper system in the next more detailed step.
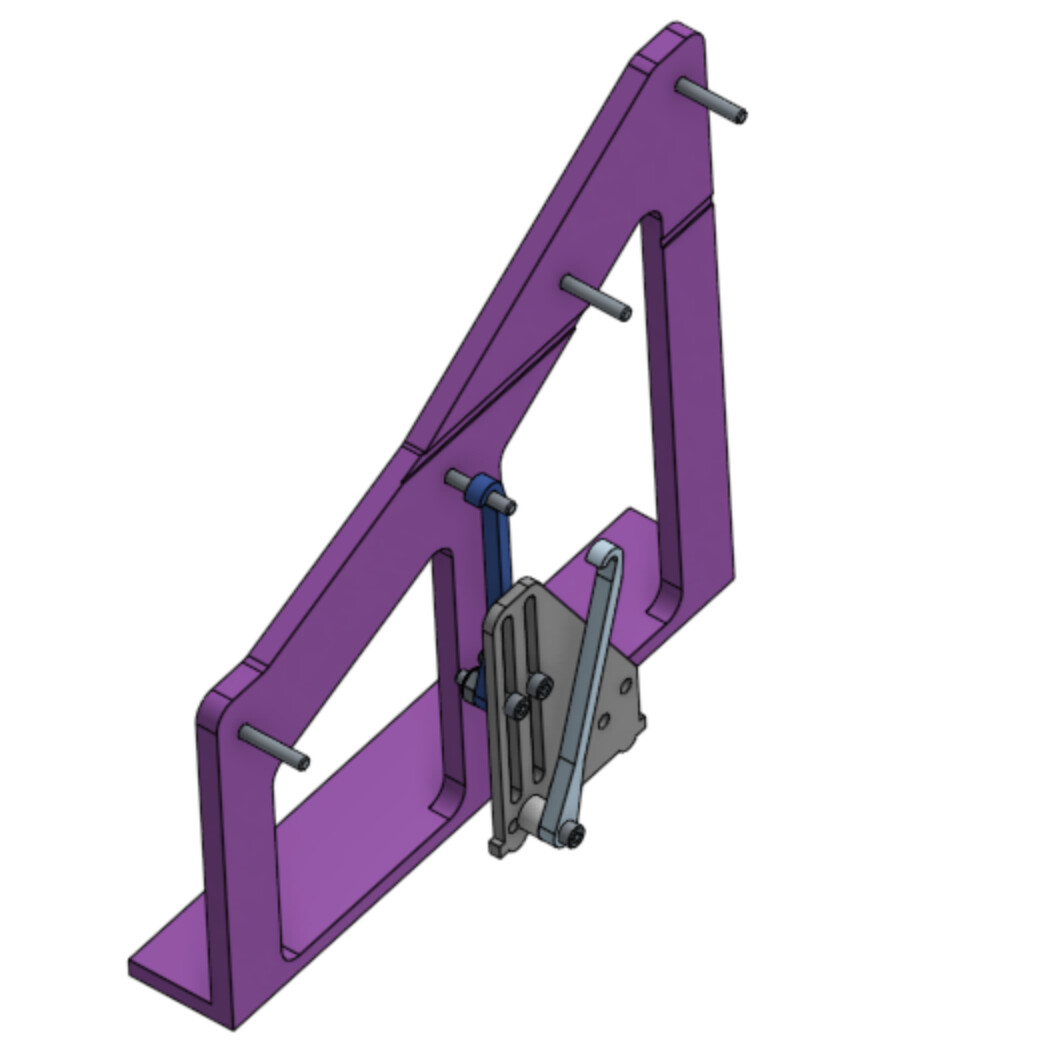
Climber
Having built a climber before and it being a fairly known challenge, the team is focused on prototyping for the high and traversal rungs. To start this is mostly an exercise in 2D sketching with the plan to move to some 3D printed 3:40 scale models to play with ideas in the physical world (thanks to @cadandcookies for the idea here). These are very early stages so expect more details here in the coming days.
Shooter
There wasn’t much work done on the shooter yesterday as we were focused on other mechanisms at the moment. There is some initial CAD work to be done to create some adjustable plates to allow us to experiment with compression and release angle, and then we should start physically testing. The three leading ideas at the moment are:
- Hooded flywheel
- Linear flywheel
- Pneumatic catapult
Again, many more details to come here as we get farther along.
Intake
The intake is where most of the focus was yesterday. The initial prototype used HYPE blocks and connectors mounted to an old kitbot to simulate driving around to collect balls. Without knowing about our indexing system, the focus was on how to handle bouncing balls and not anything about centering the balls. To accomplish this our initial idea was to add a second roller higher than the ball height to only help combat the bounce.
Happy Path
The bounce is timed perfectly such that when the ball is rising it hits the upper roller and gets sucked in.
Unhappy Path
- The ball bounces right over the intake and into the robot. This might actually be a feature if the robot can handle indexing and has a way to reject opponent balls when wanted (umbrella
 ).
). - The ball bounces and hits the upper roller, knocking the ball away from the robot. The velcro on the intake didn’t stick enough to hold on to the ball.
Takeaways
- Leaning into having bouncing balls go over the intake may be an effective strategy. The approach to the ball is the same as if trying to suck a ball in, so catching it may save the development work of settling with the intake itself if the indexing system can already handle this. This opens up the possibility of catching an opponent or a 3rd ball, so the drivers would need to be aware of this and the robot would need to have a configuration to reject catching.
- The top roller may not even need to be a roller. There is so little contact time as the ball is never compressed against anything, simply having a wedge may be just as effective.
- Compliance in the top roller/wedge would be beneficial to dampen the impact of the ball.
- Velcro has some promise, but didn’t work great in the current implementation.
Next Steps
- Experiment with the top roller not being a roller at all and simply a wedge.
- Add compliance to whatever the top deflection system is to absorb some of the bounce.
- Try without any top system to see if it is simply knocking away more balls than it is settling as the large bounces would bounce over a single roller where some hit and fly away from the top deflector.
Software
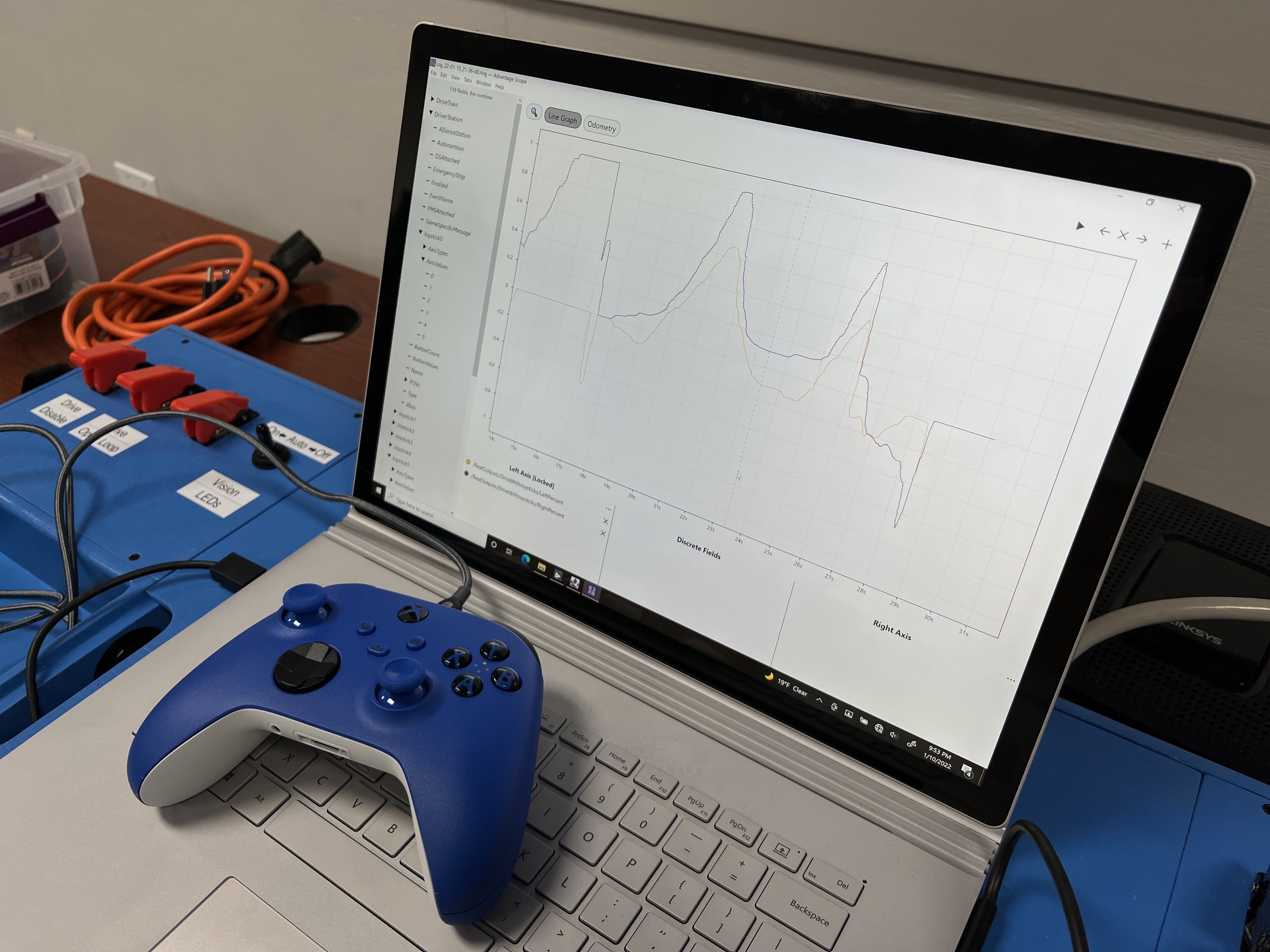
The software team made huge progress on both the OI (operator interface) and drivetrain code. This is the foundational system that will allow the team to connect controllers and run the drivetrain on any robots we test with (plus eventually the competition robot). They also tried out the new Xbox controllers and upgraded the Driver Station software. The next steps will be setting up the odometry and motion profiling systems in preparation for auto routines, and starting to explore vision options as soon as we have a target to test with.
Scouting/Strategy
The scouting/strategy subteam worked on planning out the required work for the season and creating a schedule. Here is the high level task breakdown:
- Understanding the game
- This includes trying to predict the mechanics of ball availability on the field, the tipping point for shooting high vs low, need to drive under the low rung, and much more.
- Will have a more in depth update on this soon
- Determine what metrics the team wants to scout for
- Develop the layout of the scouting app for this year
- Setup the data analytics for the outputs of the app
- Come up with a playbook for the game to use at events
- Training all our scouts in using the app
Field Build
We mocked up an initial high hub to allow for prototype testing until we can get a more realistic one built. This is built out of the rocket from 2018, the climbing bar from 2020, and some plastic found in a dumpster near our shop.

Future Prototype Teaser
Mysterious screenshot taken from the strategy zoom for some of our remote members showing some future prototype ideas…

