Scouting App
The scouting team started work on the scouting app for this year. One of the ideas they came up with was recording the exact location a team shot from by tapping on the field. This requires having an accurate field modeled in the app UI. The scouting team will do a much larger deep dive into this soon.
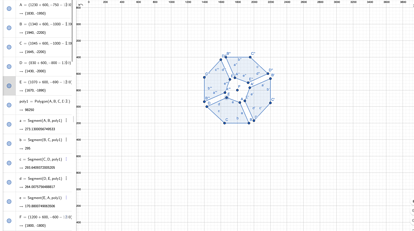
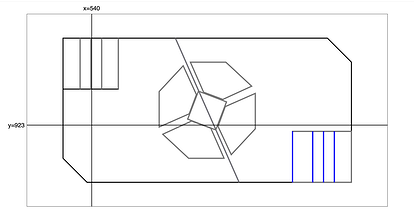
We figured out a way to streamline the process of figuring out where each field element should go on CanvasManager [our name for the scouting app UI framework]. To do this, we first uploaded a drawing of the field into GIMP. We resize it to the resolution of the app we are making so that when we hover the mouse over the image, we see the exact x and y coordinate of the mouse. After accounting for some offsets and other calculations, we transfer these coordinates into a website called GeoGebra(similar to Desmos). We can then rotate the shape we created on GeoGebra to find the other necessary points. Although there was some initial grunt-work, this process should streamline the entire process, giving us more time to work on debugging the app.
Software
The software team continued to bring up the baseline code for controlling the drivetrain and running motion profiles, in addition to working to finish up the prototype motor test board. There will be a much larger software update posted soon so this section is kept short for now.
Prototyping
Linear Catapult
The linear catapult was modified to hold two balls side by side. With this added weight the prototype struggled with range in its current form. I unfortunately don’t have any pictures/videos of this right now, so stay tuned for those over the weekend. For the next catapult revision we think we will be pivoting to a more standard rotating catapult design, but staying pneumatic.
Hooded Flywheel
This is a traditional hooded flywheel prototype with various built in adjustments. The CAD team worked on designing it and then we cut it out on our router.

First Second try!
This was at the very end of the meeting, so we only shot these two balls. Much more testing to come…
Prototype Specs
- Adjustable compressing by changing hood holes and thickness (currently 0.8″ of compression)
- 6″ flywheel (currently 2x colsons)
- 2x NEOs either 1:1 or 1.33:1 (currently 1 NEO 1:1)
- Additional top flywheel attachment powered by another NEO either 1:1 or 1.33:1, similar to the GreyT Shooter V2 (not shown or tested yet)
- 2″ Kicker wheel powered by an UltraPlanetary (not used yet)
- Mounting holes for a “ball tower” to store and feed the balls
Next Steps
- Prototype and integrate ball tunnel into the shooter to feed balls
- Test how rapidly two balls can be fed
- Test the range where we can still make shots with a fixed hood angle
- Experiment with
- Wheel type
- Compression
- Hood material, potentially foam
- Release angle
- Upper flywheel
- Flywheel speed(s)
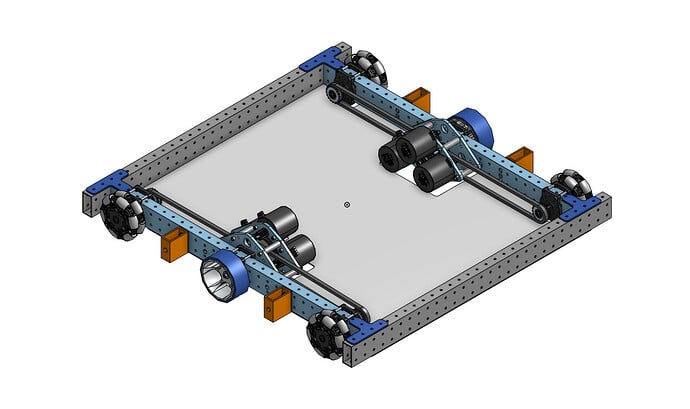
CAD
The CAD team also worked on our drivetrain CAD which is shown below. There are still some final details, but it is almost there. Currently it is 29W x 30L and has an 11:66 gear ratio.