FIRST Updates Now Interview
We had a great time on the FUN Open Alliance show a few nights ago. We were able to cover quite a lot of information during the 20 minute interview including prototype, software/odometry/logging, and scouting updates. You can find the livestream VOD here, as well as an excellently shot and edited video that our Media team lead made for the show here.
Pneumatic Catapult
As mentioned in posts above, we briefly investigated the practicality of a pneumatically-actuated catapult similar to that of 148 2016 and 1986 2016. The main benefit of a catapult to us is its reliability to consistently hit shots from a specific location (or two) without much variability- something we think flywheels could suffer from (not just this year, but also historically). It’d be nice to not have to worry about recovery times, ball inflation (looking at you incorrect gauge), and the magic numbers that compression & wheel speed bring in a flywheel.

After testing it, however, the downsides/issues that we encountered with this type of catapult were not trivial. Namely, we found that even after a few optimizations and tricks (using higher flow rate solenoids, tanks down stream from the regulator, spring loading up), it wasn’t quite fast enough to comfortably score two cargo at once. While we could have spent a few more days on potentially improving the prototype, we knew that there would be more issues to address (most notably: loading/serializing into the catapult may be a challenge) and we don’t quite have the bandwidth to do that. I hope to see some awesome double catapults out there this year 
Field Elements
Due to the limited height within our build space the manufacturing team created a mobile goal which we can take outside. Unfortunately, it was a little bit too mobile in the wrong ways…
Prototype Bot Chassis
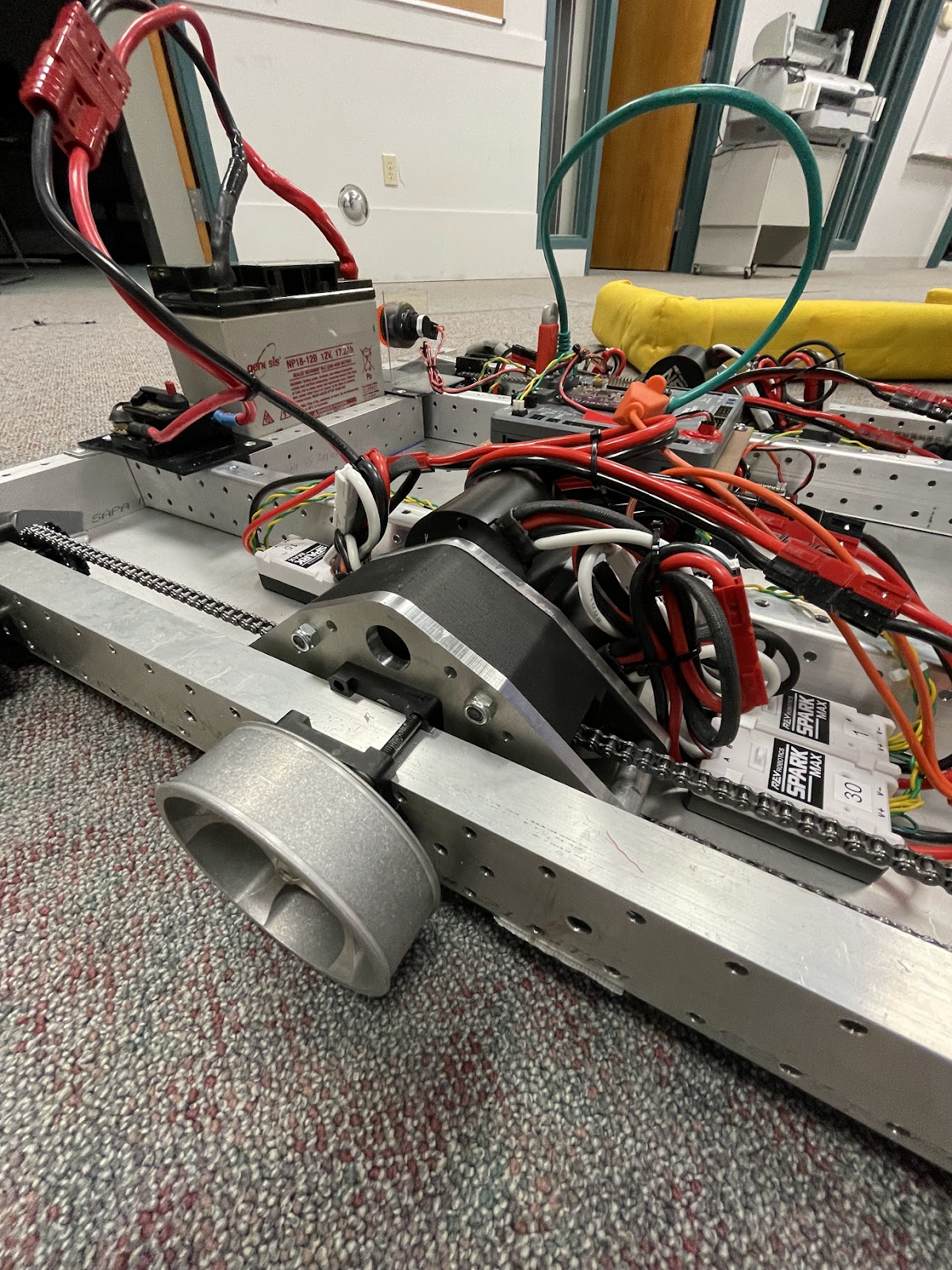
We’ve made good progress on manufacturing and wiring our prototype robot’s chassis. The electrical team has been thinking about the best way to arrange all of the electronics which will translate to the competition robot when we get to that.
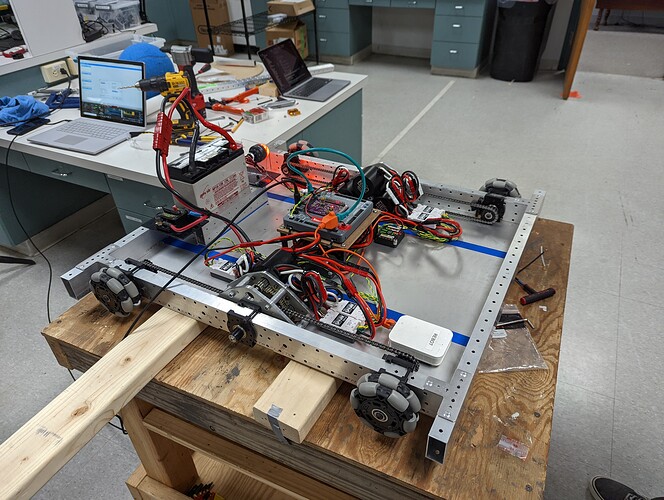
We didn’t have the tread on yet during initial testing, so it was a bit drifty. After adding the center wheels, we unfortunately weren’t able to go sideways anymore.
We also printed these gearbox covers; they don’t really serve a huge purpose other than perhaps containing some grease sprayege.
After fixing some minor details and adding battery mounting parts, we recently started manufacturing the competition robot chassis.
CAD/Design
Intake
In an effort to achieve as much compliance and robustness as possible, we’re taking a page (or two… or three) out of 1678’s book.
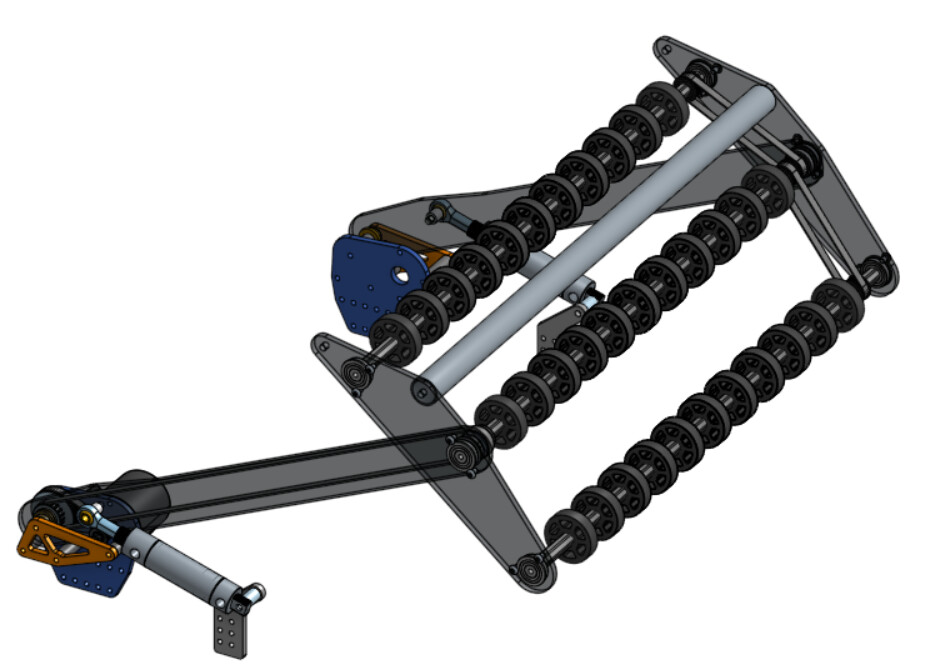{kind=link}
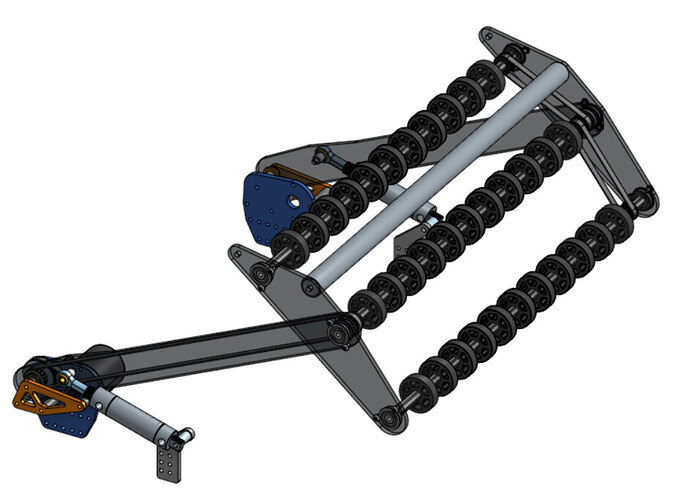
Some noteworthy features:
- The fourth “bar” of the 4-bar will just be surgical tubing, which will be tied somewhere to the superstructure.
- When the intake is actuated outside of the robot, the cylinders will be in their retracted state. This will hopefully prevent the cylinder rod from bending when we inevitably encounter an aggressive side-loading scenario
- The intake motor will be located within the robot frame instead of on the actual intake by having the pivot point also be where the belt reduction is. This should help make the intake nice and light, hopefully further increasing its capability to take a lot of hits at a competition and still survive.
What we still have to add:
- Geometry such that the intake will fold up nicely when retracted back into frame (this will likely have more to do with the tower / whatever is behind the intake)
What we might change between this prototype and the final version:
- The link lengths. With our current constraints (must prominently: the pneumatic cylinder facing “backwards” and the pivot having to be on the middle roller), the intake is geometrically forced to sit pretty high up when it’s retracted back into frame, which means that the links are pretty large. We’re thinking that we might want to change this later on, which means either tweaking the cylinder or moving the pivot point on the roller plate (or using a more traditional four bar rather than surgical tubing).
We’d like to seriously thank Citrus for publicly releasing their CAD year after year – it’s one of the resources that we find ourselves coming back to again and again for reference and it’s extremely helpful. Specifically, here is their public 2020 CAD that we’ve taken a lot of inspiration from.
Flywheel / Tower
This is the next thing on our list to finalize. We’ve begun laying out some of the basic geometry and are looking to get at least the prototype robot version assembled by the middle of this coming week.
Below is a testing video that we collected a couple meetings ago of our tower & flywheel prototype. It’s been a bit of a struggle to gather a lot of meaningful information on shooter prototypes like this because the tallest ceiling in our shop is around ~9ft, resulting in a fairly small window of error that we have to fit the cargo into in order to “score”. This has necessitated testing in the back room with all the water heaters.
We also experimented around with a top roller, which seemed to greatly reduce the backspin to help with bounce out. The main question we are trying to answer now if we can get away with a single hood angle for both the high and low goal by simply varying flywheel speed.
This is fine
We’re certainly behind on where we hoped to be, having two years off has exposed some rough edges. We’re working to make some changes to get back on track and be sure we’re ready for week 1. The main actions are to take a bit of a step back and be sure everyone is on the same page so we have as much contribution as possible. Hopefully we can share some positive takeaways shortly.