Greater Boston was a crazy weekend and quite the way to close out our final district event of the year. Thanks to our amazing alliance partners 125 and 5563 for being so great to work with and helping take home the win. Special shout out to fellow open alliance team 95 for another hard fought battle in finals, one of these events we hope to end up on the same side of the glass as you.
{kind=link}

We were also incredibly honored to be presented with the District Chairman’s Award. Here’s our Chairman’s video created by our media lead AJ.
This performance currently puts us ranked 1st in NE with 151 district points (somehow only 3 off our maximum possible)! I’m incredibly proud of this achievement, especially with being able to share the whole journey here as a part of the #openalliance.
Upgrades for Greater Boston
We meant to get this out before the event, but due to a chaotic lead up that slipped through the cracks. We had 2 main mechanical changes between our week 1 and week 4 events.
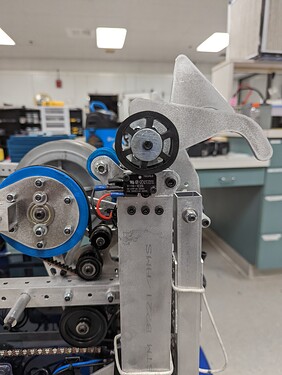
Motorized Hood
Our initial hood design for our week 1 event was pneumatically-actuated, with our shooting locations being from the tarmac line and the fender. Given our team and our resources, we found that this struck a good balance between mechanical simplicity and performance. We did find the tarmac line shot difficult to line up and get the correct distance for, as well as suffering from being susceptible to defense more.
These shortcomings along with our more proven software investments into odometry and targeting made us confident in moving to a more complex solution for week 4.
The Design
The two options we considered were a 3D printed rack and pinion and a belt driven at the pivot point. Due to space constraints with the shooter being near frame perimeter and fitting with the existing shooter hood, we decided on the latter.
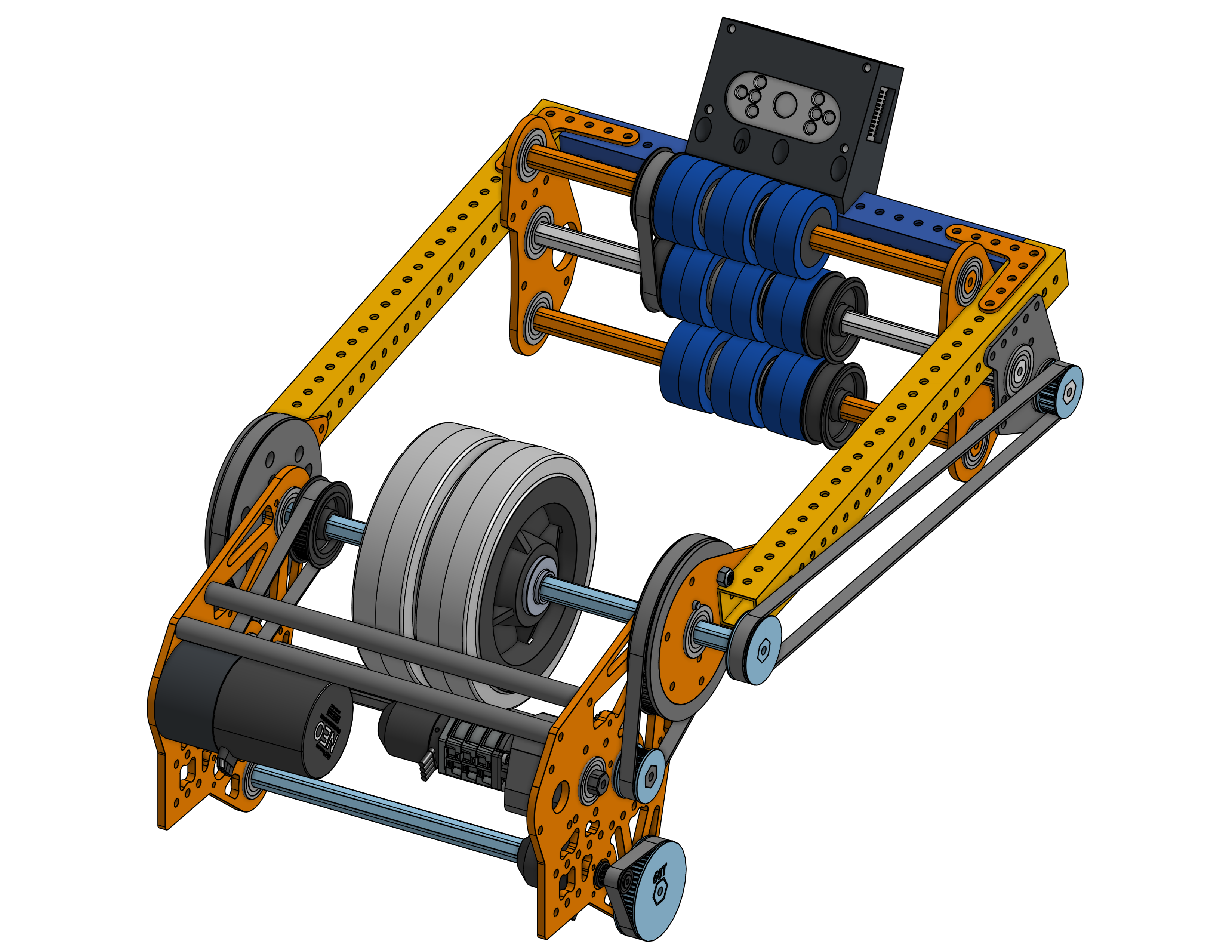{kind=link}
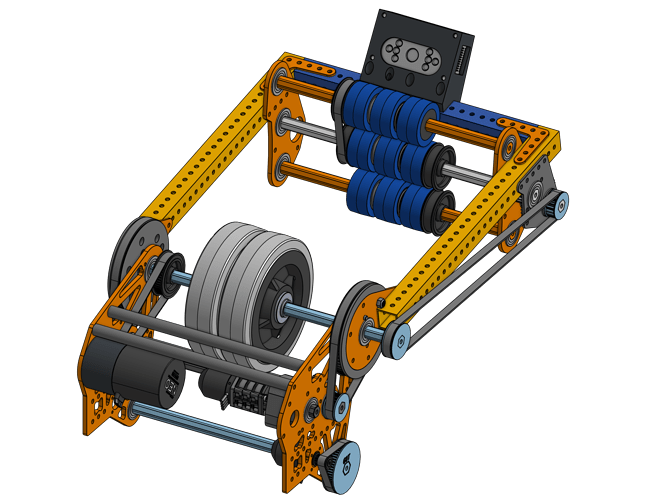
The hood is powered by a NEO 550 through a ~270:1 reduction. We were able to reuse many components of the old shooter with the flywheel and hood geometry staying the exact same while changing the main plates to have mounting for the hood pivot motor & shaft, in addition to widening everything outside of the main plates to accommodate the pulleys.
There will be a later post going into the software which allows us to fully utilize this adjustability.
The Results
This change allowed us to shoot anywhere from against the hub to the alliance wall (although the far shots were a rather ridiculous arc due to limited hood travel which bounced out a lot). This proved incredibly valuable in allowing the driver to simply stop when they found an opening and shoot with the shooter adjusting to the correct angle and speed to hit the goal and minimize bounce out. The ability to shoot from the lauchpad also enabled another safe location when under heavy defense.
Climber
While our climber performed okay at week 1, it gave us a lot of trouble in maintenance and had reliability issues getting above the mid rung. The main issues were:
- The arms (especially the left one) would bind on the way up and not fully extend. This never caused a problem on the field, but was obnoxious in the pits and very well could have caused problems on the field.
- The spools would wind at different rates, causing the two arms to get out of sync. This caused problems as one side wouldn’t hook onto the passive hooks which would prevent climbing to the next level.
The Changes
The changes to address these issues resulted in a near complete redesign of the climber, even though you probably couldn’t notice from far away as the core concept remained the same. The main changes were:
- Swap from a printed bushing to a bearing block on all surfaces to prevent binding
- Optimize the geometry (stage height, hook size, stage overlap) to allow for more overlap between the telescope and passive hooks.
- Change the spool from using a rope to using a flat strap to more consistently wind and keep both arms even

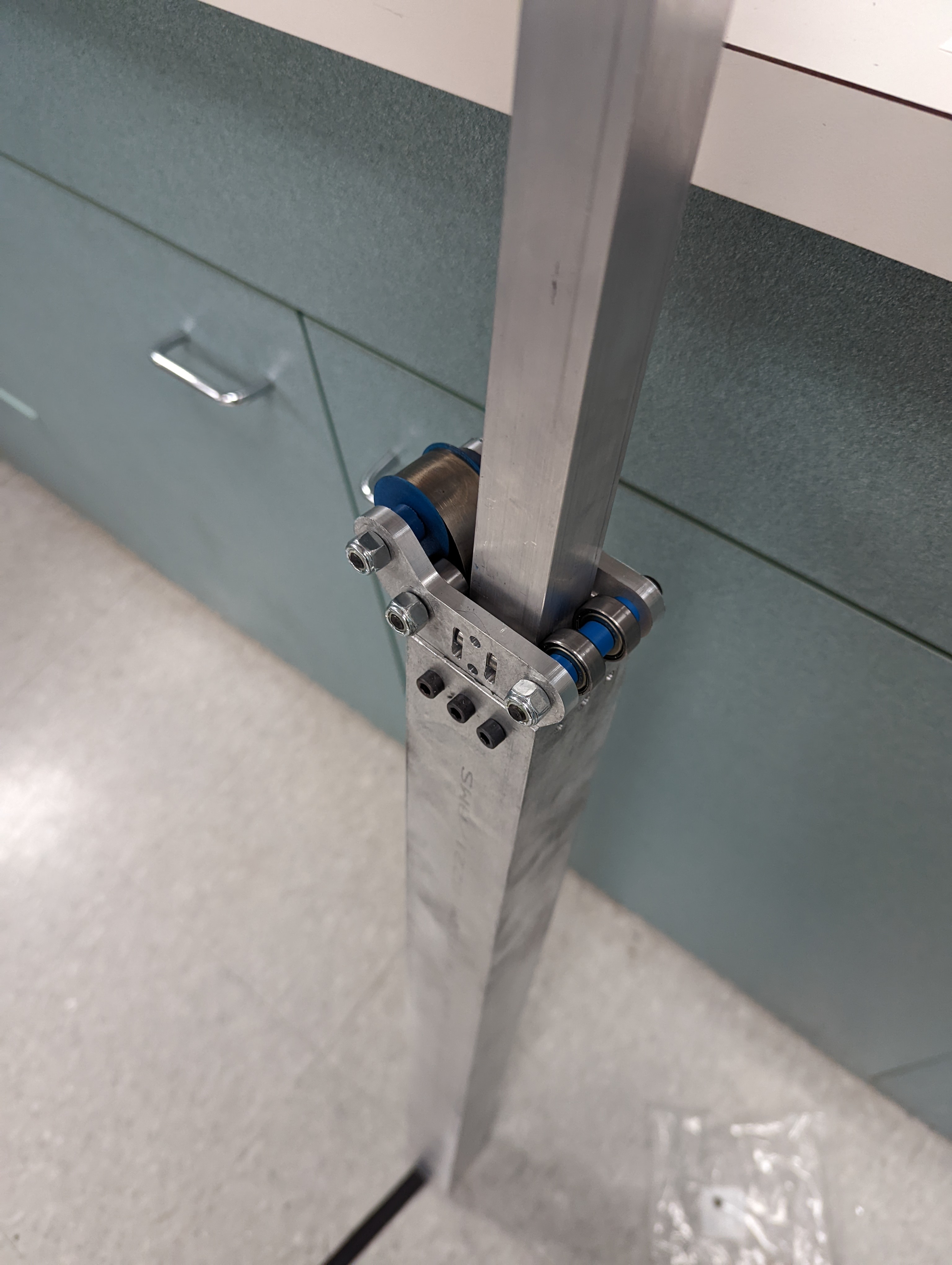{kind=link}
The results
While there were some serious growing pains getting everything new to work (this will be its own more detailed post), the final result was incredibly consistent. We had no mechanical failures and the only missed traversal climbs were due to cutting the timing too close to not be back in time or having alliance partners in the way.
Reliability
A big focus for this year was to have a robot which was simple and reliable to be able to play in every match. So far I think we’ve done a great job at working towards this goal.
The only major mechanical failure we had at Greater Boston was a broken flange our our intake pulley in our first quals match. After fixing that and upgrading the flange with a modified fender washer it worked well throughout the rest of the event.
Next Steps
Thankfully with our position in the district rankings and the way NE qualifies teams this year we are locked in for qualifying to Houston and can start solidifying plans. We are discussing the best way to spend the limited time remaining between mechanical upgrades, software improvements, and driver practice.
Thanks to everyone who’s followed along with us this season so far. I hope we provided useful information which was able to benefit your teams.
-Max