
Our high level robot concept has been the same for a while, but there are tons of updates to the lower level details. This post walks through where we were before and the high level feedback which lead to our design changes. This feedback comes from a combination of internal discussions and reviews with @davepowers. There’s tons of small details which we weren’t able to cover here, but this touches the major ones.
Starting State
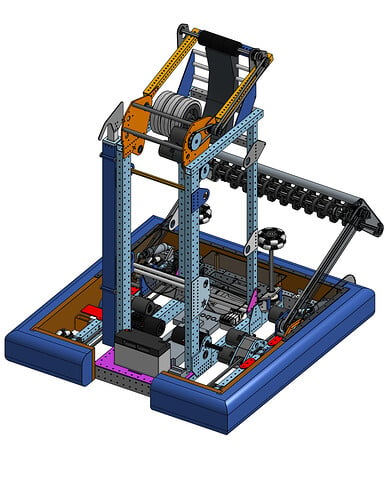
At first glance this looks very similar to our current design, but without much of the assembly details there.
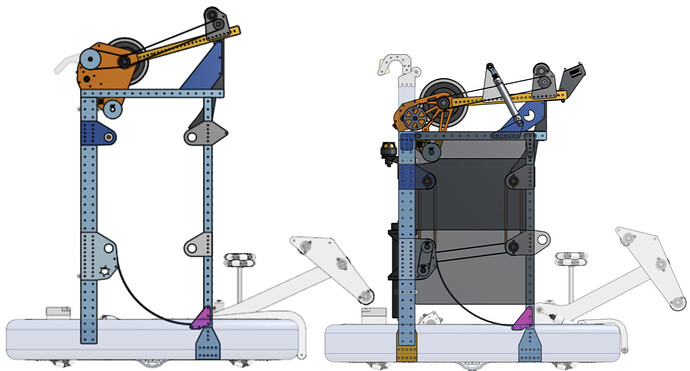
Tower
Feedback: Try and minimize the CG as much as possible. The tower can comfortably hold 2 balls already, so it should be able to shrink down without issue.
Result: Lowered the tower height by 6 inches which results in one ball being held at the top of the tower and another on the curve at the bottom. This was a remarkably easy change (updating 1 number) in the CAD due to how we derive the top level geometry of the robot off a main sketch. We expected everything to explode when doing this, but it somehow updated without issue.
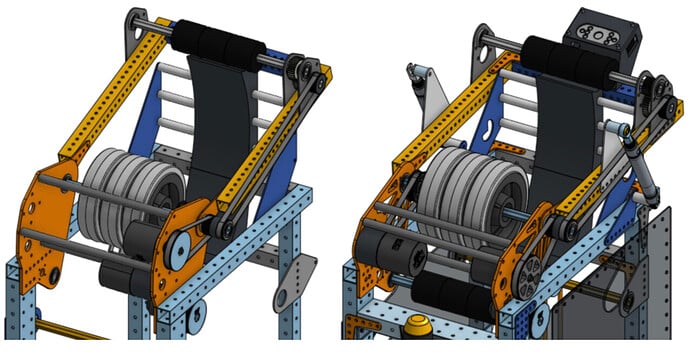
Shooter
Feedback: Minimize the weight at the top of the tower.
Result: Removed the top 2 motor mounts and made the different belt spacings in line with each other at the bottom. This limited us to 2 motors between the main flywheel and hood wheel, but this seemed more than sufficient from our testing.
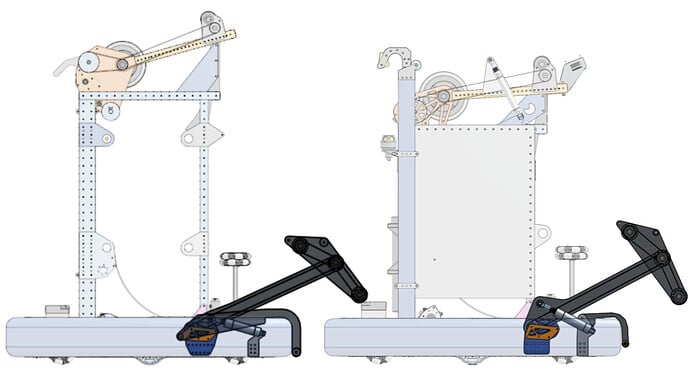
Intake
Feedback: The intake arms are incredibly floppy side to side
Result: This was by design, but it was still somewhat crazy. To reduce this we shortened the main link with a shorter belt, which moved the pivot point closer to the frame
Feedback: The drop down bar pivot is also very long, it should be able to have it’s pivot moved much closer to the bumper.
Result: In looking at the geometry again, it was possible to move the pivot point of the passive drop down bar to the mounting plate the piston pivots from, making the drop down bar much more compact.
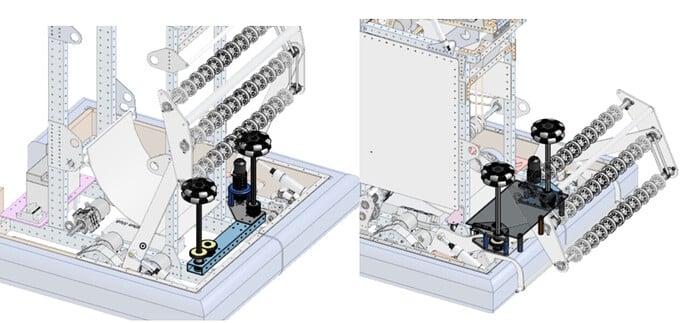
Hopper
Feedback: The cross bar currently blocks the electronics, we should try to minimize components in that area to make access easier.
Result: The hopper became mostly two independent parts, with only a belt crossing the center. This made it much easier to access the compressor and pneumatic hub without taking the hopper fully off.
Next Steps
We should be mounting the climber which is the last major component on our robot tonight and will be sharing the final robot shortly once everything is running.
