
We originally thought this would be an upgrade for after week 1, but it seems we have miraculously got it working. Here’s a little teaser from onboard the driver cameras.
JK about teasers here’s the full thing
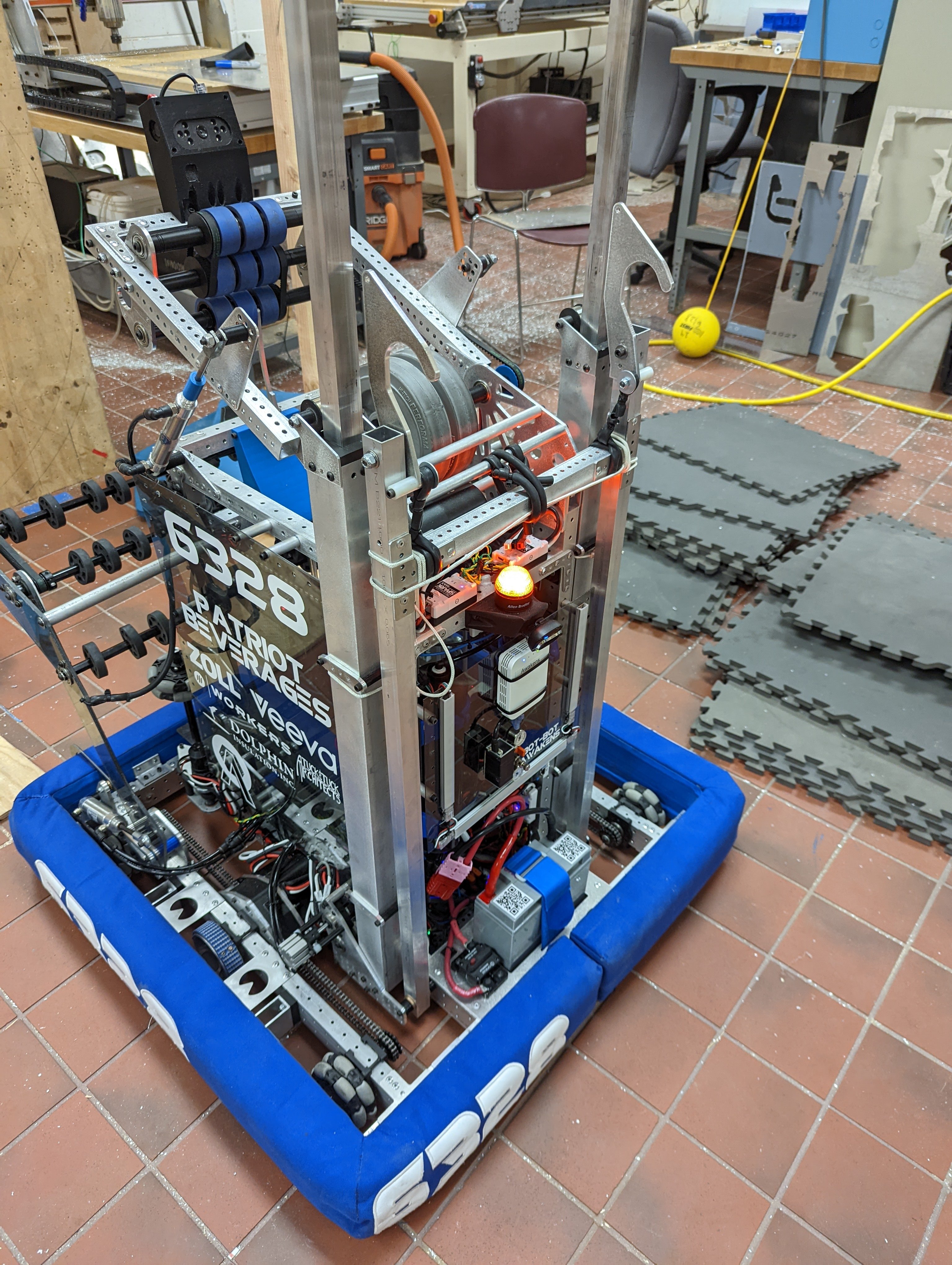
Our Low & Mid elevator mounting/gearbox was designed to have holes for a traversal to mount to, but at the time we didn’t know exactly how it would work.
{kind=link}
This design is very similar than many this year, with the largest exception being everything besides the elevator is passive. The hooks are spring-loaded to get out of the way when the bar comes down and then when the elevator is pulled back up the weight goes onto the passive hooks and they tilt out by the weight of the robot. We then extend and hook onto the next bar, exploiting the fact that the top of the hook is sloped and that we are swinging into the bar. This allows us to avoid having any pneumatics on the High/Traversal system.
Due to somewhat relying on timing of the swing this entire sequence is automated with a button push to trigger this whole sequence.
Good luck to everyone competing week 1 and excited to hit the field for the first time!
{kind=link}
