
We mentioned some of the changes we’ve been working on with our shooter, and we’d like to give an update. To recap, we identified an issue with the three positions of our pneumatic hood. Between wall (the lowest position) and line (the middle position), we had a dead zone where making shots was nearly impossible. We adjusted the angle of the middle position to bridge this gap. To make accurate shots, we manually tune flywheel speed at various distances for each hood position and model the curve using a quadratic regression. This allows the robot to calculate the flywheel speed for any distance. After adjusting the line position, our data looks like this:
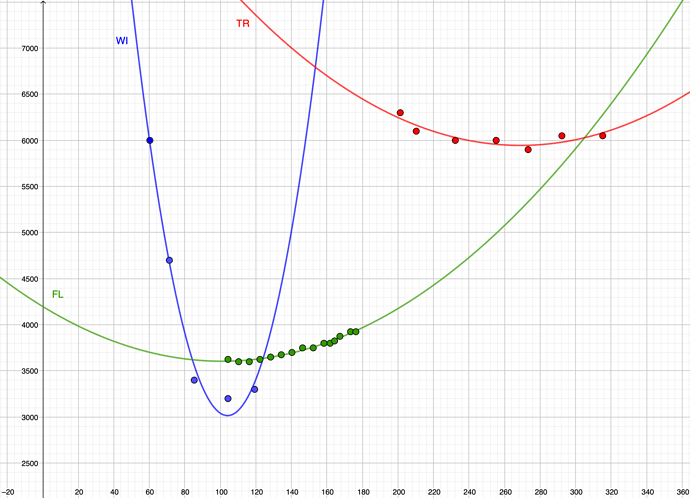
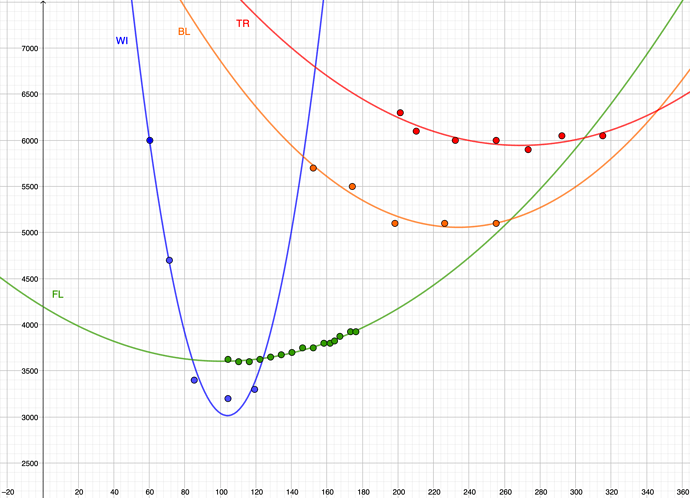
The x axis represents distance to the inner port and the y axis represents flywheel speed in RPM. Blue is the wall position (low), green is the line position (middle), and red is the trench position (high). The data points visible here represent the maximum usable ranges for each position. As you can see, we have eliminated the gap between wall and line, but introduced a new dead zone between line and trench. Unfortunately, that dead zone covers one of the zones for Interstellar Accuracy and is our preferred shooting location for the Power Port challenge. For the next iteration, we added a fourth hood position at the same location as the original line. After identifying the issue, we had the new plates designed and cut in under 24 hours:

After installing them, we found that adding back the original line position perfectly fills in our range:
The code automatically selects hood position and flywheel speed by combining pure wheel odometry and Limelight data. Adding a fourth hood position makes maneuvering the hood a little more complex, since the main lift now presses against our stops from two directions. This also means that disabling doesn’t always return the hood to a known position (it can apply enough pressure to the stops that they are unable to retract). The code will detect when that might be happening and automatically do a full reset the next time it moves the hood. It’s nothing a state machine can’t solve!
For the shooting challenges this year, we’ve been using a flat power port. For a 3D power port, the distance to the target when calculating flywheel speed is relative to the inner port. For a flat target, we simply move the “inner port” forward. This means that our characterization data for most positions works in its current state. The only exception is the wall, because our previous data relied on bouncing the power cell off of the inside of the structure and into the inner port. Clearly, this doesn’t work for a flat target. We created a separate model for the wall position when using a flat power port (colored purple):
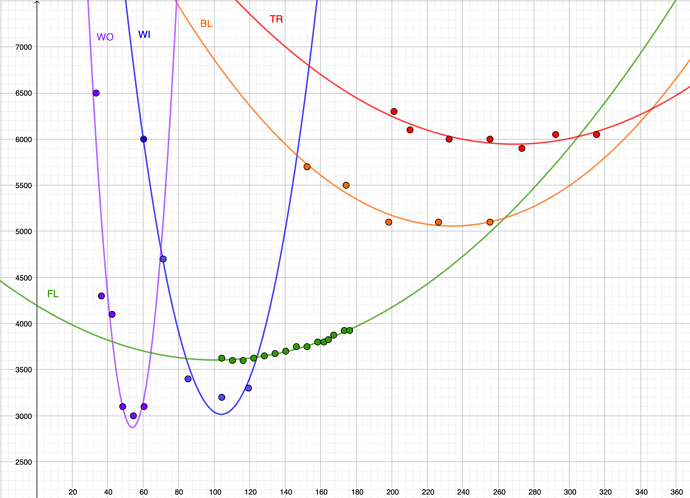
The minimum distance is much lower than the model for the 3D power port because the robot can get physically closer to the “inner” target. This introduces a new dead zone between wall and line, but it doesn’t affect any important shooting locations. After making these improvements, we are now turning our attention to the two shooting challenges. We’ll be doing formal runs of Interstellar Accuracy soon, but our initial testing has shown good results. For the Power Port Challenge, we decided that an autonomous routine would be best for minimizing the shooting time. Here’s an example (some speed improvements to come):
The robot stays on the left side of the field throughout the challenge, meaning all of the power cells return in the center or to the right. That means human players can collect and return them quickly without running across the field. Like Interstellar Accuracy, we’ll be moving into formal runs of this challenge soon. We’re happy to answer any questions.